
Наш подход к позиционированию внутри помещений заключается в разработке дешевой, простой в использовании и эффективной системы определения местоположения.
В Indoors Navigation Platform (INP) используются самые современные математические алгоритмы для расчета наиболее точного местоположения внутри помещений для наших заказчиков.
Давайте сейчас обсудим их.
1. Метод позиционирования по "ближайшему".
Обнаружение «ближайшего» является одной из самых простых технологий геолокации, дающей информацию об относительном местоположении объекта. Положение пользователя определяется с помощью радиосигналов от источников (маяков), расположение в помещении которых известно. Когда мобильное устройство обнаруживает более одного маячка, позиция определяется в месте расположения маячка с самым сильным сигналом.
Точность зависит от плотности развертывания маячков и дальности действия их сигналов. Метод реализован в Indoors Navigation Platform (INP) с помощью технологии Bluetooth и Wi-Fi.
2. Методы Латерации, Трилатерации и Мультилатерации.
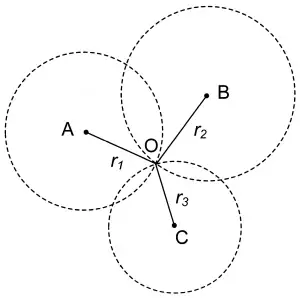
Все три термина латерация, трилатерация и мультилатерация, относятся к определению положения по расстояниям. При латерация и трилатерация определяется положение объекта путем измерения его расстояния от нескольких опорных точек. Это также называется методом измерения дальности. При трилатерации для определения позиции необходимы минимум мере три фиксированные известные точки точки.
3. Метод на основе параметров сигнала.
Большинство беспроводных систем локализации вычисляют расстояние до устройства позиционирования, используя либо информацию о времени, либо разницу углов. В обоих случаях на них влияет многолучевой эффект. Из-за этого точность расчетного местоположения может быть снижена.
Альтернативный метод заключается в оценке расстояния от неизвестного узла до опорного узла. Этот метод возможен только с помощью радиосигналов. Беспроводные системы позиционируют устройство, используя параметры принятого сигнала, при этом индикатор уровня мощности принятого сигнала (RSSI) является наиболее широко используемым. Оценки измерений RSSI сильно зависят от помех окружающей среды, и они также не линейны. Эти методы работают с технологией Bluetooth и Wi-Fi.
4. Метод на основе опорных точек сигналов (fingerprint).
Метод на основе fingerprint основывается на построенной карте уровней сигналов в помещении и не требует использования моделей распространения радиосигнала внутри помещения. Для того чтобы определить местоположение этим методом, создается база данных, содержащая информацию об уровнях сигнала в различных точках помещения, а также план помещения. Карта уровня сигналов от точек доступа Wi-Fi и Bluetooth маяков должна быть «привязана» к реальным координатам в соответствии с планом помещения. Местоположение пользователя может быть оценено с помощью измерения уровня сигналов от маячков (точек доступа) и поиска точных совпадений в базе данных, с привязкой к точке на карте, где измерены такие же уровни сигналов.
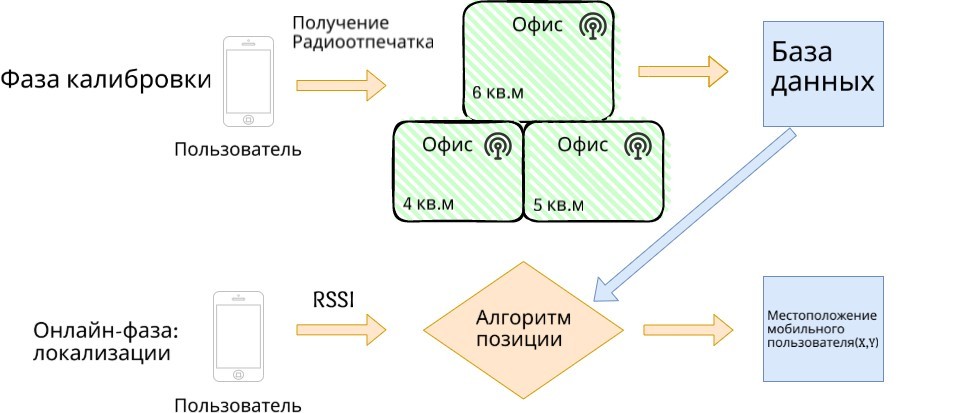
Данный метод состоит из двух этапов:
Этап 1 — это так называемая фаза калибровки, автономная фаза измерений.
Этап 2 — фаза локализации.
Автономная фаза предназначена для измерения RSSI в каждой контрольной точке помещения. На этом этапе мы собираем RSSI со всех маяков и в четырех направлениях на каждом месте измерения. Эти собранные данные RSSI хранятся в базе данных вместе с координатами их измерения.
Когда система геолокации запущена, мобильное устройство измеряет уровень сигнала в неизвестном месте, а затем текущие измеренные значения мощности сигнала сравниваются с базой данных и определяется место наибольшего совпадения. Куда и переносится точка положения пользователя.
Данный метод обеспечивает относительно высокую точность определения местоположения, однако из-за отражений сигналов происходит периодическое перескакивание на недостоверное положение.
Основным недостатком метода является трудоемкий процесс калибровки.
Другой проблемой метода является чувствительность к изменениям в окружающем пространстве: перемещение объектов в здание (людей, мебели), дифракция и и отражения, которые приводят к изменениям в распространении сигнала.
Для поддержания точности позиционирования процесс калибровки следует периодически повторять для пересчета предварительно определенной карты с уровнями сигналов.
5. Метод определения угла прибытия сигнала.
Технология определения угла прибытия (AoA) представляет собой типичный алгоритм ранжирования на некоторых устройствах для определения направления прибытия сигнала передающего узла, и вычислить относительное положение или угол между неизвестным узлом; затем используется триангуляция или другие методы для определения местоположения.
По сравнению с другими техническими решениями, AoA позиционирование в помещении имеет более высокую точность и большую зону покрытия, при этом обслуживание и стоимость внедрения низкая.

Индорс Навигейшн является одним из первых российских разработчиков геоинформационных систем позиционирования в помещениях, включающую в себя аналитические и маркетинговые инструменты, цифровой двойник объекта. За прошедшие годы мы успешно продемонстрировали нашу способность быстро адаптироваться к новым тенденциям и реалиям, разрабатывая новые способы геолокации внутри помещений. Сегодня решения для позиционирования и навигации внутри помещений включают технологии, основанные на Wi-Fi, Bluetooth Low Energy (BLE), AoA.
Мы будем рады сотрудничать с вами!
Обращайтесь — и вы получите решение, основанное на самых последних достижениях в позиционировании в помещениях!
За более подробной информацией переходите в раздел сайта - https://indoorsnavi.pro/





Одна мысль на тему “Алгоритмы определения местоположения.”
Интересно было узнать о данных методах