
Our approach to indoor positioning is to develop a low-cost, easy-to-use, and efficient location system.
The Indoors Navigation Platform (INP) uses state-of-the-art mathematical algorithms to calculate the most accurate indoor location for our customers.
Let's discuss them now.
1. The "nearest" positioning method.
Detecting the "nearest" is one of the simplest geolocation technologies that provides information about the relative location of an object. The user's position is determined using radio signals from sources (beacons) whose location in the room is known. When a mobile device detects more than one beacon, the position is determined at the location of the beacon with the strongest signal.
The accuracy depends on the deployment density of the beacons and the range of their signals. The method is implemented in the Indoors Navigation Platform (INP) using Bluetooth and Wi-Fi technology.
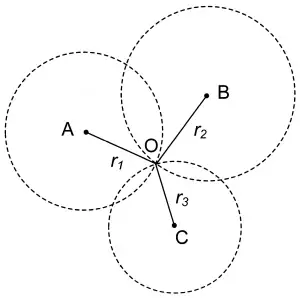
2. Methods of Lateration, Trilateration and Multilateration.
All three terms alliteration, trilateration, and multilateration refer to determining position by distance. During lateration and trilateration, the position of an object is determined by measuring its distance from several reference points. This is also called the range measurement method. In trilateration, at least three fixed known points are needed to determine the position.
3. A method based on signal parameters.
Most wireless localization systems calculate the distance to the positioning device using either time information or angle differences. In both cases, they are affected by the multipath effect. Because of this, the accuracy of the calculated location may be reduced.
An alternative method is to estimate the distance from an unknown node to a reference node. This method is only possible with the help of radio signals. Wireless systems position the device using the parameters of the received signal, with the Received Signal Power Level Indicator (RSSI) being the most widely used. RSSI measurement estimates are highly dependent on environmental interference, and they are also non-linear. These methods work with Bluetooth and Wi-Fi technology.
4. A method based on the reference points of the signals (fingerprint).
The fingerprint-based method is based on a built-in map of indoor signal levels and does not require the use of indoor radio propagation models. In order to determine the location using this method, a database is created containing information about signal levels at various points in the room, as well as a room plan. The signal strength map from Wi-Fi access points and Bluetooth beacons should be "linked" to real coordinates in accordance with the room plan. The user's location can be estimated by measuring the level of signals from beacons (access points) and searching for exact matches in the database, with reference to a point on the map where the same signal levels are measured.
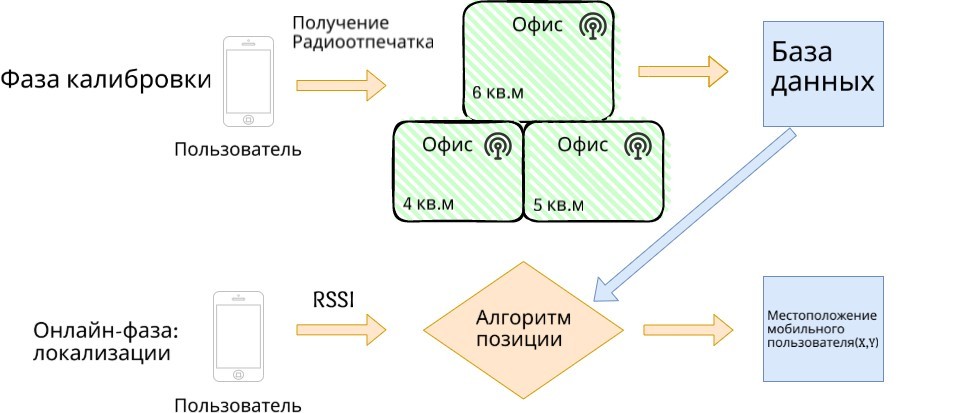
This method consists of two stages:
Stage 1 is the so—called calibration phase, an autonomous measurement phase.
Stage 2 is the localization phase.
The stand-alone phase is designed to measure the RSSI at each control point of the room. At this stage, we collect RSSI from all beacons and in four directions at each measurement location. These collected RSSI data are stored in a database along with their measurement coordinates.
When the geolocation system is running, the mobile device measures the signal strength in an unknown location, and then the current measured signal strength values are compared with the database and the location of the greatest match is determined. Where the user's position point is moved.
This method provides a relatively high accuracy of location determination, however, due to signal reflections, periodic jumps to an unreliable position occur.
The main disadvantage of the method is the time-consuming calibration process.
Another problem with the method is its sensitivity to changes in the surrounding space: the movement of objects into the building (people, furniture), diffraction and reflections, which lead to changes in signal propagation.
To maintain positioning accuracy, the calibration process should be repeated periodically to recalculate a predefined map with signal levels.
5. The method of determining the angle of arrival of the signal.
Angle of Arrival (AoA) technology is a typical ranking algorithm on some devices to determine the direction of arrival of a signal from a transmitting node, and calculate the relative position or angle between an unknown node; then triangulation or other methods are used to determine the location.
Compared to other technical solutions, AoA indoor positioning has higher accuracy and a larger coverage area, while maintenance and cost of implementation are low.

Indoors Navigation is one of the first Russian developers of geographic information systems for indoor positioning, which includes analytical and marketing tools, and a digital twin of the facility. Over the years, we have successfully demonstrated our ability to quickly adapt to new trends and realities by developing new ways to geolocate indoors. Today, indoor positioning and navigation solutions include technologies based on Wi-Fi, Bluetooth Low Energy (BLE), and AoA.
We will be glad to cooperate with you!
Contact us and you will receive a solution based on the latest advances in indoor positioning!
For more information, go to the website section. - https://indoorsnavi.pro/





One thought on “Алгоритмы определения местоположения.”
Интересно было узнать о данных методах