In huge office centers, where hundreds of employees move between floors every day, in multi–tiered hospital complexes with their endless corridors, on industrial sites the size of a small city - everywhere there is an invisible problem that has not been solved effectively for a long time. It's about accurately recording and tracking the movement of equipment, people, and assets within large enclosed spaces where traditional GPS/GLONASS technologies are powerless. Modern internal positioning systems have become the missing link that turns chaotic traffic into orderly data that brings real economic benefits.
When walls stop being an obstacle: indoor tracking technologies
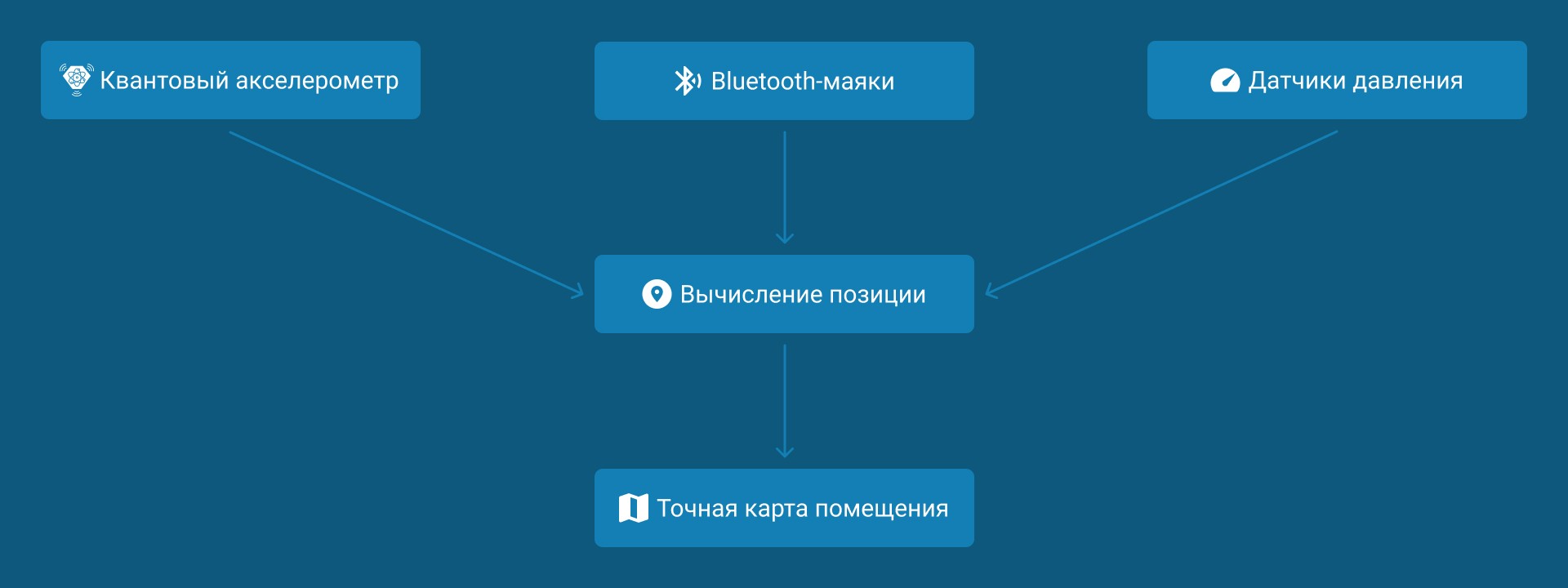
Modern internal accounting systems are complex ecosystems that combine Bluetooth Low Energy technologies, ultrasonic sensors, RFID tags, and computer vision. Unlike the primitive accounting systems of the past, which required manual data entry or periodic inventories, the new solutions offer continuous monitoring in real time. In bank offices and depositories, this means instant detection of the movement of valuable assets, in hospitals – the ability to quickly find expensive medical equipment, and in warehouses – optimization of logistics flows without stopping work processes.
The transformation that has taken place in transport hubs is particularly significant. Major airports such as Дубай или СингапурFor several years now, internal positioning systems have been used to track trolleys, loading equipment and luggage, which cannot be said about Russian ones. Accuracy of up to tens of centimeters allows you not only to know where an object is located, but also to analyze its movement patterns, identifying bottlenecks in logistics and saving millions on process optimization. When every extra meter of baggage cart travel, multiplied by thousands of flights, turns into significant costs, such systems pay off in an amazingly short time. And such systems pay off even faster when frequent losses of carts and containers of on-board kitchen equipment, which are not cheap at all, are stopped by service companies at different airports.
Office spaces: from chaos to transparency
Modern business centers, especially those owned by large IT companies, have long ceased to be just spaces with workplaces. These are complex organisms with hundreds of laptops, servers, mobile devices, and other valuable equipment circulating daily. Internal accounting systems have transformed the management of these assets from a headache for administrators into a transparent and automated process. Now you don't have to spend hours searching for a specific device – just open a special dashboard where the location of each asset is displayed in real time with the history of its movements and the user's data who took it last.
An interesting case demonstrates one of the campuses Google in California, where the introduction of an equipment tracking system allowed reduce equipment losses by 40% already in the first year of use. But more importantly, it has become possible to analyze exactly how the equipment is used, which rooms are most in demand, and how space can be optimized to improve work efficiency. When it comes to tens of thousands of square meters of office space, such data becomes invaluable for making managerial decisions.

Medicine under control: when every minute counts
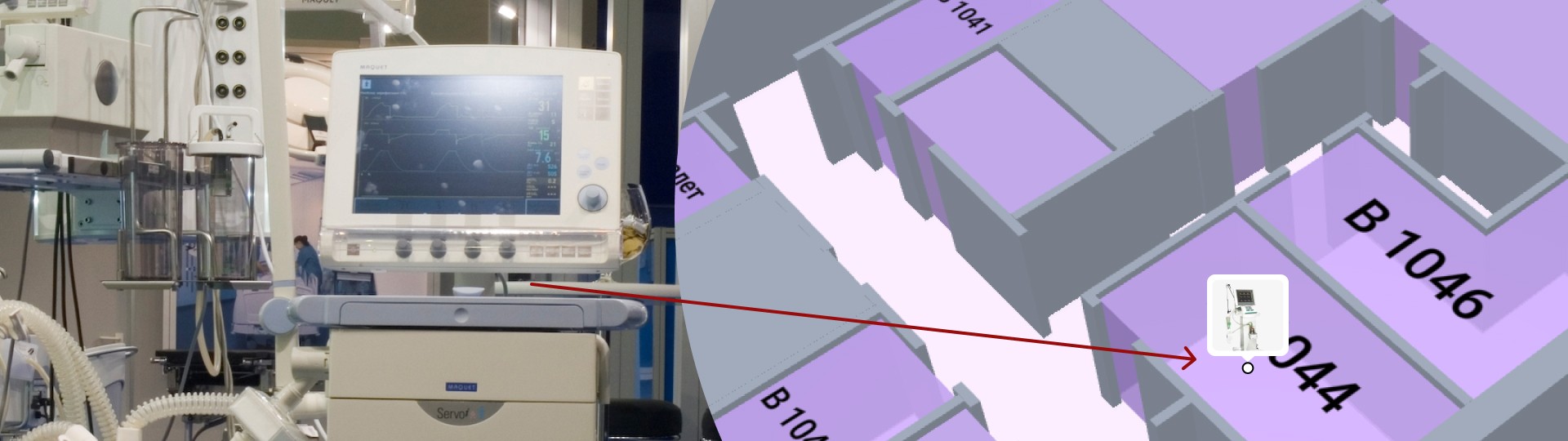
In medical institutions, internal accounting systems are no longer just a convenient tool – in some cases, they literally save lives. Modern hospitals are equipped with a huge amount of specialized equipment, which often costs hundreds of thousands of dollars. When a critical ventilator or a valuable drug is urgently needed, and the staff spends precious minutes searching for it throughout the building, an accurate positioning system becomes not a luxury, but a necessity.
The Mayo Clinic in Rochester, after the introduction of the medical equipment tracking system, she reported on reducing the search time for equipment by 65%. But more importantly, it has become possible to analyze the routes of movement of equipment and personnel, identifying non–obvious logistical problems. It turned out that some devices were idle in some wings of the hospital, while in others they were sorely lacking – simply because no one was systematically tracking these movements. Now hospital logistics has become the subject of precise calculations rather than random decisions.
Industry and warehouses: logistics without blind spots
In industrial enterprises and large warehouse complexes, internal accounting systems have revolutionized asset management. When it comes to thousands of pieces of equipment, tools and materials scattered over an area of several hectares, manual accounting becomes not only ineffective, it turns into fiction. Modern solutions allow not only to know the exact location of each facility, but also to automatically account for its movement between areas of responsibility, control access, and even predict the need for maintenance.
Company Boeing At its factory in Everett, it has implemented a tracking system for more than 50,000 tools and fixtures. The results exceeded expectations: the search time for the necessary tool was reduced from 30-40 minutes to 2-3, and losses of expensive equipment decreased by 75%. On an industrial scale, where every minute of downtime costs a lot of money, such systems quickly recoup all the costs of implementation, becoming an integral part of the production process.

Education and Science: when every device is important
В университетских кампусах и научно-исследовательских центрах системы внутреннего учета решают сразу несколько важных задач. Дорогостоящее лабораторное оборудование, которое раньше могло «потеряться» между кафедрами или даже зданиями, теперь находится под постоянным контролем. Библиотечные фонды, особенно редкие издания, получают дополнительную защиту от несанкционированного выноса. Даже обычные проекторы и ноутбуки, которые раньше часто исчезали из аудиторий, теперь можно быстро найти с точностью до конкретной комнаты.
Massachusetts Institute of Technology after the implementation of the equipment tracking system, he reported on cost reduction to replace lost equipment by 60%. But more importantly, it has become possible to analyze the actual load of equipment and optimize its use between different departments. When an expensive scientific device worth hundreds of thousands of dollars is not idle, but is effectively used by different research groups, this directly affects the productivity of the entire institution.

The future of internal accounting: from control to forecasting
Modern systems of internal positioning and equipment accounting are no longer just tracking tools – they are turning into complex analytical platforms. Machine learning allows you not only to fix the current position of an object, but also to predict its movements, identify anomalies in use, and offer space and logistics optimization. Some advanced solutions have already implemented integration with enterprise resource planning (ERP) systems, which creates a single digital environment for managing all the assets of the organization.
Indoors Navigation is at the forefront of these technologies, offering solutions that combine high positioning accuracy with deep analytics and ease of integration into existing infrastructure. In a world where resource efficiency is becoming a key competitive advantage, internal accounting systems are no longer optional – they are becoming an essential element of the modern business environment, an invisible skeleton that supports and organizes complex organizational structures.
Когда каждый актив, каждый прибор, каждое устройство в большом комплексе становится видимым и управляемым, это меняет саму философию работы с ресурсами. Больше нет необходимости покупать избыточное оборудование «на всякий случай» – теперь можно точно знать, что есть, где находится и как используется. Нет нужды тратить рабочее время сотрудников на бесконечные поиски – вся информация доступна в несколько кликов. И самое главное – появляется возможность принимать управленческие решения, основанные не на догадках, а на точных данных, собранных в режиме реального времени за счет платформы Индорс Навигейшн. В этом и заключается настоящая ценность современных систем внутреннего учета и позиционирования.
Leave a request for: https://indoorsnavi.pro/
👇 Subscribe and keep up to date with innovations! 👇