Ажиотаж вокруг интернета вещей нарастает, но большинство потребителей не знают о методах, которые используются в этом, а большинство компаний не используют все доступные инструменты.
Одними из наиболее удобных и доступных устройств, которые до сих пор недостаточно используются, являются маячки iBeacon. Это устройства с поддержкой Bluetooth версии 4.0+, которые могут связываться с внешними устройствами по протоколу Bluetooth. Они имеют небольшой микропроцессор, помогают определяют геолокацию в помещениях, выполняют базовую обработку и шифрование данных, а также запускают определенные сценарии действия в мобильных приложениях.
Из за лежащей в основе технологии Bluetooth маячки имеют физическое ограничение зоны покрытия около 100 метров, но прекрасно работают как в помещении, так и вне его на улице. Их главная привлекательность — низкая цена, а также тот факт, что они могут выступать в качестве инструментов привлечения клиентов в коммерческих помещениях, таких как торговые центры, концертные залы, спортивные объекты и стадионы.
Как работают маяки BLE?
Маяки передают сигналы находящимся поблизости устройствам с поддержкой Bluetooth, например смартфонам. Эти устройства улавливают сигналы, и могут передавать сообщения пользователю. Начальный сигнал не несет конечного сообщения, только его идентификатор. Если пользователь принимает это уведомление, его устройство отправляет этот идентификатор на сервер, который возвращает сообщение, например предлагающее скидку, рекламную акцию или другую ценную информацию.
Это важно для маркетинговых компаний в реальном времени, основанных на ограниченных по времени предложениях и рекламных акциях с привязкой к локации. Эти гаджеты помогают компаниям устанавливать прямые отношения со своими клиентами и получать огромное преимущество, заключающееся в том, что они действительно удерживают внимание клиентов достаточно долго, чтобы донести сообщение.
BLE для спортивных и развлекательных заведений
Единственное условие для того, чтобы компания могла использовать маяки, — это разрешение уведомлений конечным пользователем. Пока клиент принимает push-уведомления в мобильном приложении организации, нет предела возможностям маркетинговых методов, которые эта компания может использовать для дополнительных продаж и повышения лояльности.
В случае со спортивными объектами общение между заинтересованными сторонами, такими как спортивные команды, спонсоры, средства массовой информации и посетителей (владельцев билетов), может продолжаться до тех пор, пока зрители находятся в помещении.
Общение может начинаться с простой регистрации по прибытии, а также может включать согласие человека на получение дальнейших уведомлений во время игры. Небольшой диапазон маяков работает на пользу рекламодателям, например, при отправке сообщения только в определенную часть стадиона с эксклюзивными предложениями или, скажем, бесплатной пиццей.
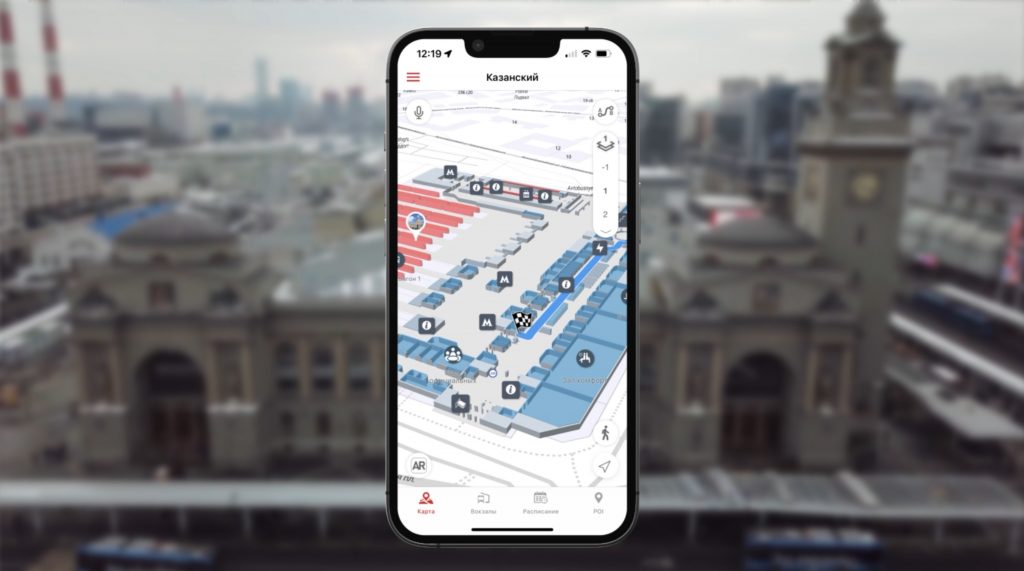
Это может помочь организаторам мероприятий разработать полезный маршрут клиента со стратегическим размещением продукта. От помощи болельщикам в навигации по стадиону до предложения товаров для них по сниженным ценам во время игры — маяки могут одновременно увеличить как доход, так и качество обслуживания клиентов.
На поле
Начиная с самих игроков, маяки можно прикрепить к форме членов команды и использовать для отслеживания их результатов в режиме реального времени в целях улучшения и обучения. Спорт развивается благодаря большим данным, и это может открыть новое направление понимания динамики игр и индивидуальной эволюции каждого игрока.
Новый опыт
Площадки, которые хотят использовать технологию маяков, могут использовать опыт соревнований по теннису в Уимблдон. Там установили маячки от железнодорожной станции до стадиона и отправили инструкции покупателям билетов. Эти сообщения персонализировались в режиме реального времени, указывая наилучшее место для очереди, чтобы избежать длительного ожидания.
Посетители также могут использовать приложение, чтобы позвать продавца хот-догов на свое место, а не просто ждать и махать руками, чтобы привлечь внимание ближайшего.
На стадионе Levi’s в США маяки служат тоже важной цели: помочь людям найти дорогу к ближайшему туалету. Особенно это актуально, когда для помещений большой площади: 171 871 кв. м.
Контекстная информация в реальном времени
В прежние времена спортивный комментатор давал дополнительную информацию и большой экран использовался для быстрого предоставления фактов об игроках или командах. Уже сейчас информация может доставляться на мобильные телефоны болельщиков в режиме реального времени с высокой степенью персонализации в зависимости от их интересов.
Интересный способ использования маяков придумали в автоспорте, он заключается в том, чтобы расположенные в каждой машине метки во время гонок передавали болельщикам все результаты в приложении, дополненном профилями гонщиков, характеристиками автомобилей, проезжающих мимо.
Гипер-персонализация
Технология маячков в сочетании с интеллектуальной программой продажи билетов может предложить владельцам вип билетов уникальный сервис.
Руководство «Сакраменто Кингз» планирует использовать маяки, чтобы запомнить дни рождения болельщиков, любимых игроков и напитки по их выбору. Объединив эти данные с информацией о положении пользователей, фанаты смогут попросить своего героя поздравить их с днем рождения в день игры или хотя бы помахать когда они на стадионе.
Простая пре-продажа и покупка в 1 клик
Решение с маячками может стимулировать увеличение продаж. Идея состоит в том, чтобы воспользоваться состоянием эйфории болельщиков во время игры и предложить им предметы, которые имеют смысл в данном контексте: от напитков до кепок или брелоков. Конечно, билеты со скидкой на следующие турниры или сезоны тоже являются отличной идеей для пре-продажи.
Применение BLE меток произведет революцию в мире спорта и развлечений. Это будет сделано путем предоставления более персонализированного опыта, повышения продаж и предоставления данных о игроках в режиме реального времени, чтобы пригласить болельщиков как можно чаше на стадион.
Еще больше информации на: https://indoorsnavi.pro/stadiums-navigation/